COSPAS-SARSAT SYSTEM
Cospas-Sarsat was initially developed under a memorandum of understanding among agencies of Canada, France, the former Union of Soviet Socialist Republics and the United States of America, signed in 1979.
Cospas-Sarsat is a combined Russian-English acronym and means:
- COSPAS – Cosmicheskaya Sistyema Poiska Avariynich Sudov; and
- SARSAT – Search and Rescue Satellite Aided Tracking. On 1 July 1988, the four partner States providing the space segment signed the International Cospas- Sarsat Programme Agreement, which ensures the continuity of the system and its availability to all States on a non- discriminatory basis. In January 1992, the Government of the Russian Federation assumed responsibility for the obligations of the former Union of Soviet Socialist Republics. A number of States, non-parties to the agreement, have also associated themselves with the programme.
Through their association with the programme, States contribute ground receiving stations that enhance Cospas-Sarsat distress alerting capabilities and/or participate in international Cospas-Sarsat meetings dedicated to the worldwide coordination of system operations and programme management.
The objectives of Cospas–Sarsat are to ensure the long– term operation of the system, provide distress alert and location information on a non–discriminatory basis and support the search and rescue objectives of the International Civil Aviation Organization (ICAO) and the International Maritime Organization (IMO).
The system comprises of:
- A space segment operating in low–Earth orbit (LEO) and geostationary orbit (GEO);
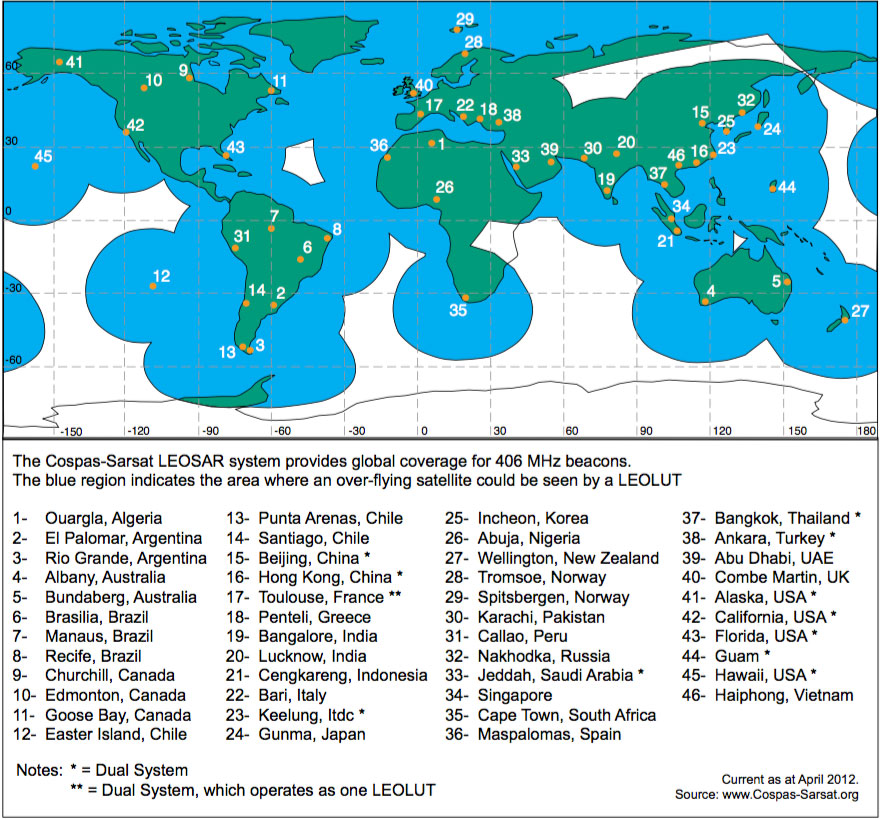
- A ground segment consisting of satellite receiving stations, known as local user terminals (LUT), and data distribution centres, known as mission control centres (MCC); and
- Emergency radio beacons operating at 406 MHz, the characteristics of which comply with appropriate provisions of the International Telecommunication Union (ITU) and Cospas– Sarsat specifications. Further information on the Cospas–Sarsat system can be found in the Admiralty List of Radio Signals (ALrS) Vol. 5, and at: www.cospas–sarsat.org/
Description of the system
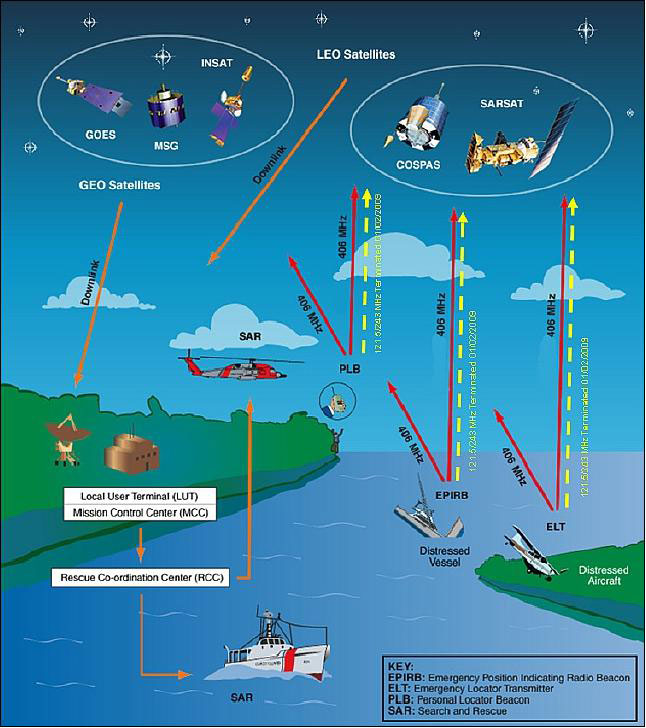
Search and rescue instruments provided by Canada and France are own on the polar–orbiting satellites of the National Oceanic and Atmospheric Administration (NOAA) of the United States of America. This comprises the Sarsat portion of the Cospas–Sarsat space segment. The Russian Sterkh series of polar– orbiting satellites also carry the search and rescue instruments that make up the Cospas portion of the space segment. Additionally, search and rescue instruments are carried on the NOAA geostationary operational environmental satellites (GOES) series of satellites, the European Space Agency’s (ESA) Meteosat Second Generation (MSG) meteorological satellites and on the Indian INSAT–3 series satellites.
These instruments are capable of detecting signals on the Earth’s surface transmitted from distress beacons referred to as emergency locator transmitters (ELTs), emergency position–indicating radio beacons (EPIRBs) or personal locator beacons (PLBs). ELTs are used primarily on aircraft, EPIRBs on maritime vessels and PLBs by individuals on land.
ELTs, EPIRBs, and PLBs may operate on the 406 MHz frequencies with 121.5 MHz used for homing. The 406 MHz beacons transmit a digital code that contains information about the type of beacon. Each 406 MHz beacon in the world has a unique identifier. The unique identi er allows for additional information, the registration data, to be linked to each beacon. After receipt of ELT, EPIRB or PLB signals, the satellite relays the signals to the LUT.
From 1 February 2009, satellite detection of 121.5 MHz and 243 MHz distress beacons was discontinued.
Only 406 MHz distress beacon transmissions are detected by satellite, and the 121.5 MHz signal used only for aircraft homing on the 406 MHz beacon.
Modes of operation
The Cospas–Sarsat system provides two modes for the detection of beacon signals – the real time and the global coverage mode.
• RealTimeMode–inthismode, arepeateronboard the satellite relays the EPIRB signals directly to ground, where it is received and processed by a LUT. If both a beacon and a LUT are simultaneously within view of a satellite, the EPIRB transmissions can be processed immediately.
A satellite covers an area within approximately 2 000 km either side of its track over the ground. If a LUT is not within view of a satellite, the information from the EPIRB which is relayed to Earth is lost. This fact limits the detection and location of EPIRBs operating in the real time mode to particular geographical areas surrounding a LUT.
• Global Coverage Mode – in this mode, signals from an activated 406 MHz EPIRB are frequency and time–tagged and stored in the satellite’s memory. As the satellite’s path brings it into view of a LUT, information, including the beacon unique identifier, frequency of detection and time of detection, is continuously relayed down to the LUT.
The global coverage mode is so described because it does not suffer the geographical limitations of the real time mode and allows detection and location anywhere on the Earth’s surface. It is this fact that makes 406 MHz EPIRBs acceptable for the GMDSS.
The LUT, after computing the location of the emergency beacon using Doppler processing, transmits an alert message to its associated mission control centre (MCC). The MCC performs matching and merging of alert messages with other messages received, sorts the data geographically and subsequently transmits a distress message to another MCC, an appropriate search and rescue authority such as a national rescue coordination centre (RCC) or a foreign SAR point of contact (SPOC).
The Cospas–Sarsat distress alert formats received at an RCC are given in Appendix B, of the IAMSAR Manual, Vol II.
Principle of location
The Cospas–Sarsat system employs Doppler shift principles, using the relative motion between a satellite and an activated beacon to calculate the location of that beacon. This technique produces a position line, upon which are two positions, one either side of the satellite’s track over the ground. One is the actual position, and the other is the “mirror image” on the other side of the satellite’s track. This ambiguity is resolved with a subsequent satellite pass.
The frequency time plot (Doppler Curve) in Figure 17 is representative of a signal heard by a LEO satellite passing over a stationary transmitter on the surface of the Earth. The point of in ection of the curve represents the point in time where the satellite was closest to the transmitter (TCA – Time of Closest Approach). The actual shape of the curve can be processed to indicate the distance the transmitter was from the satellite track.
Using this information, and by knowing where the satellite was at all times during the pass, it is possible to plot two lines which represent the distance from the satellite track where the transmitter could have been. Then knowing the time of closest approach of the satellite, it is a simple matter of drawing perpendicular lines from the point on the satellite track at TCA to the lines representing the distance between the transmitter and the satellite track. Where these lines intersect represent two possible locations for the transmitter, one being the actual location and the other being its mirror image. See Figure 18.
A subsequent satellite pass on a di erent satellite track can be used to resolve the ambiguity. An estimate of the true and image location can also be calculated by taking into account the Earth rotation when computing the Doppler solutions. However, this ambiguity resolution technique is dependent upon the stability of the transmitted frequency.
As the 406 MHz beacons transmit a 5 W burst of data of approximately 0.5 s duration every 50 s (±5%), the higher peak power increases the possibility of detection by the satellite.
If the LUT receives limited bursts from the 406 MHz EPIRB then a Doppler position cannot be calculated but the identity information contained within the signal will be processed and transmitted to a RCC. With location protocol beacons this may include an encoded position.
System overview
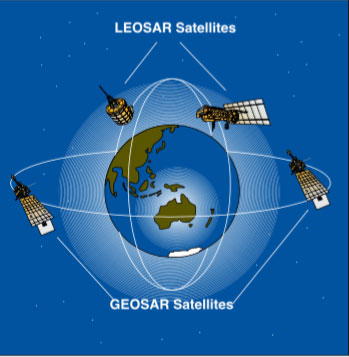
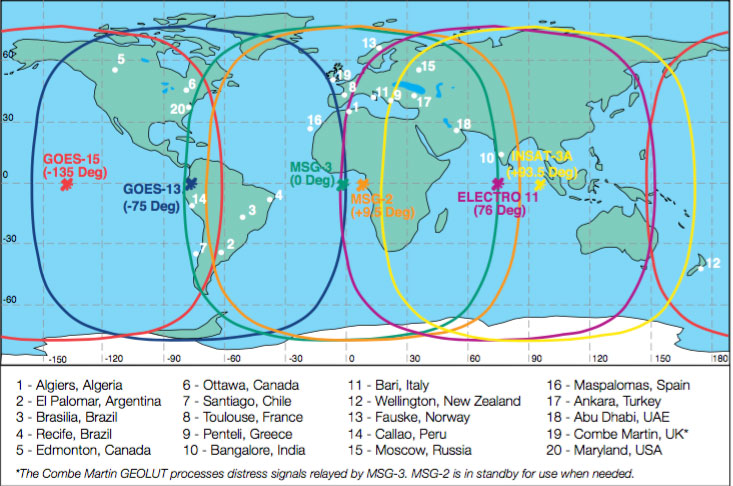
The Cospas–Sarsat space segment includes satellites in LEO and GEO. Satellites in LEO and their corresponding ground receiving stations are known as the LEOSAR system, while satellites in GEO and their corresponding ground receiving stations constitute the GEOSAR system. Figure 20 shows the relationship between the LEOSAR and GEOSAR orbits.
When the two systems are combined Cospas-Sarsat is able to provide a robust capability by providing:
• Global LEOSAR coverage;
• Near-instantaneous GEOSAR coverage;
• Independent LEOSAR Doppler positioning;
• High probability of detection/location with the LEOSAR system anywhere on land or at sea, even in situations where obstacles block the beacon transmission to a GEOSAR satellite; and
• High system capacity.
The satellites in the two types of orbit are considered complementary. While the geostationary satellites offer near-instantaneous detection of 406 MHz distress beacons, they do not provide Doppler locating capabilities and their field of view is limited to the area between 70N and 70S.
The LEO satellites provide global coverage and Doppler locating capabilities but have an inherent delay given their orbital characteristics and field of view.
Cospas-Sarsat estimates that approximately 1.2 million (2013) 406 MHz distress beacons are currently in use worldwide. While many of those beacons are carried by aircraft and maritime vessels in response to national and international carriage requirements, a growing number are carried by non- mandated users.
International emergency beacon carriage requirements are developed by the appropriate organs of ICAO and IMO. Annexes 6 and 10 of the ICAO Convention on Civil Aviation specify the 406 MHz ELT carriage requirements for aircraft that fall unser the Convention. A Cospas–Sarsat EPIRB operating at 406 MHz can be used to comply with IMO guidance that vessels covered by the International Convention for the Safety of Life at Sea (SOLAS) carry an EPIRB.
New developments
Space segment
The parties to the Cospas–Sarsat agreement continue to plan for the long–term operation of the LEOSAR space segment and the longer term operation of the GEOSAR system.
Future space segment plans include the study of placing search and rescue instruments in a mid- Earth orbit (MEO) on board global navigation satellite systems such as the United States Global Positioning System (GPS), Russian GLONASS and the proposed European Galileo system. Search and rescue instruments in that orbit could significantly enhance current operations.
Distress beacons
In order to make e ective use of search and rescue instruments in geostationary orbits, new 406 MHz distress beacons have been introduced with the capability to accept position information from internal or external navigation devices such as GPS receivers. This has the potential to provide near–instantaneous alerting and locating via the GEOSAR system.
New frequency channels
The 406.0–406.1 MHz band has been set aside by ITU for low–power satellite emergency position– indicating radio beacons transmitting from the Earth to space. At present, Cospas–Sarsat distress beacons transmit at 406.025, 406.028, 406.037 and 406.040 MHz, thereby using only a portion of the 406.0-406.1 MHz band.
In anticipation of an increase in the number of 406 MHz distress beacon users due to the phasing out of 121.5 MHz satellite alerting and the potential impact on system capacity resulting from lack of frequency spreading, Cospas–Sarsat has prepared a comprehensive frequency management plan.
International 406 MHz registration database
The effectiveness of 406 MHz distress beacons is signi cantly improved when the beacons are properly registered and the registration information is available to search and rescue authorities. Search and rescue authorities have expressed concern that a number of national administrations do not have proper facilities to maintain and disseminate registration information.
In order to address those concerns, Cospas-Sarsat has made available the International Beacon Registration database (IBRD) system, operational from 16 January 2006 (www.406registration.com).




Be the first to comment